¶ OpenRC Parametric Chinook.
Software:
https://github.com/projunk/ChinookESP32
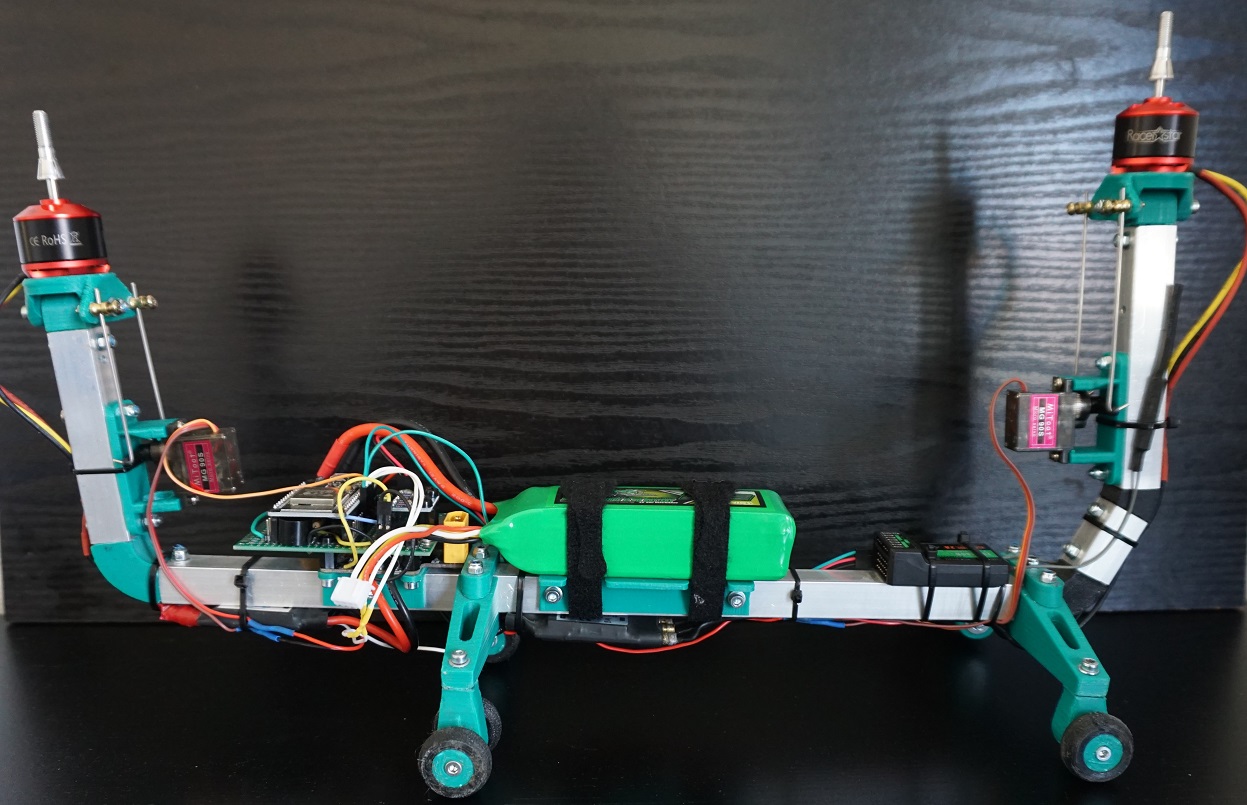
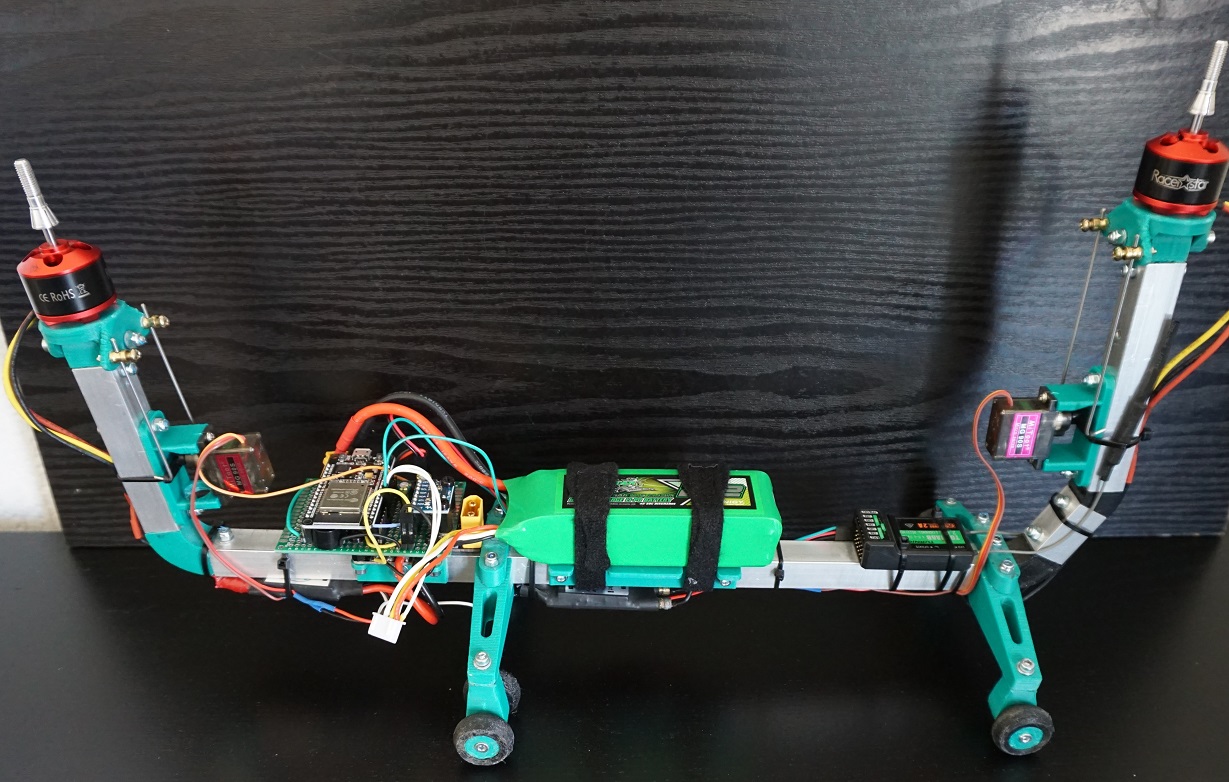
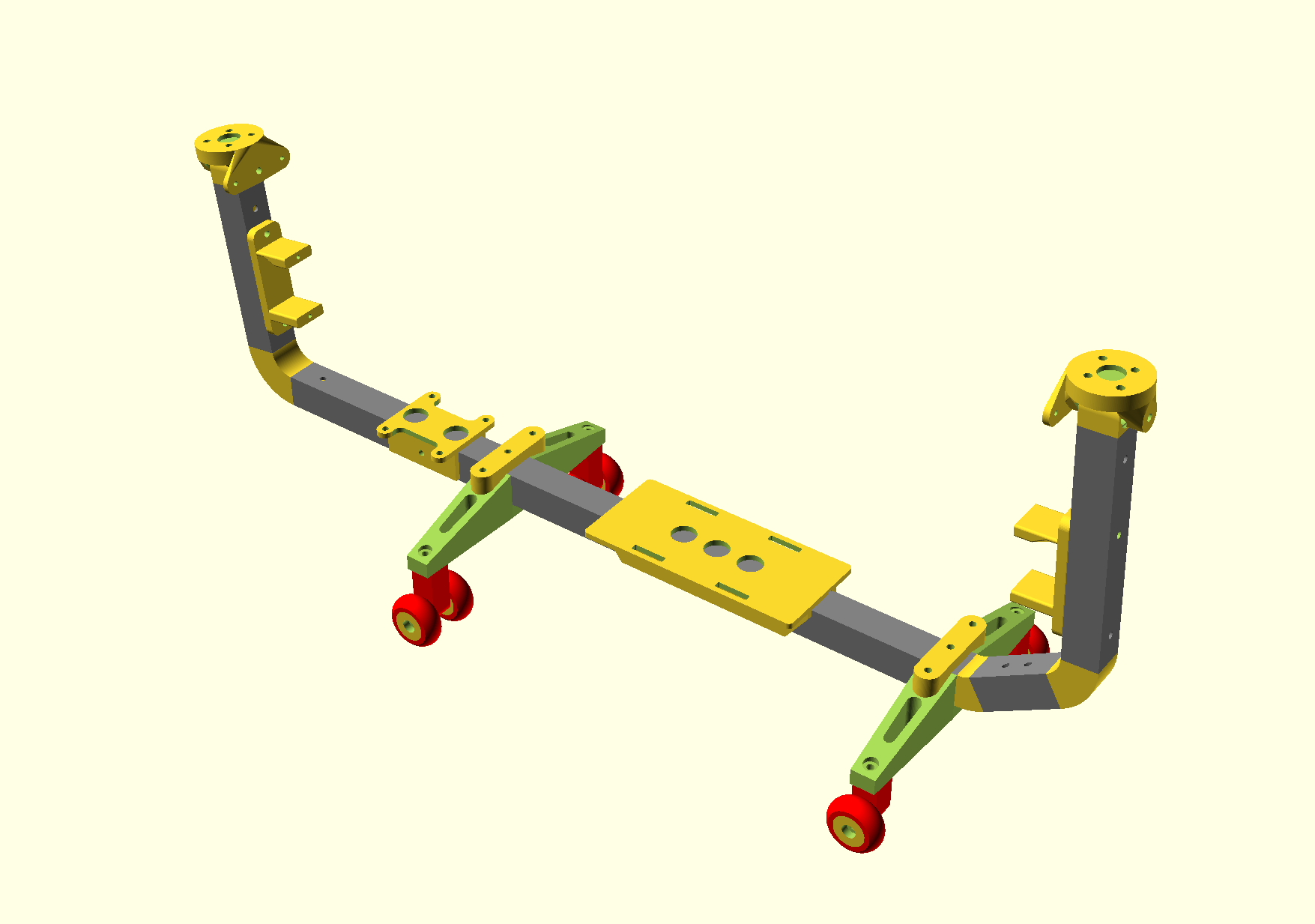
This is a parametric version of Tom Stanton's Chinook design.
I have tried to make the Chinook fly using a naze32 flight controller with both cleanflight and betaflight, but could not achieve stable flight using the PID values that seem to work successfully for other people flying a similar design.
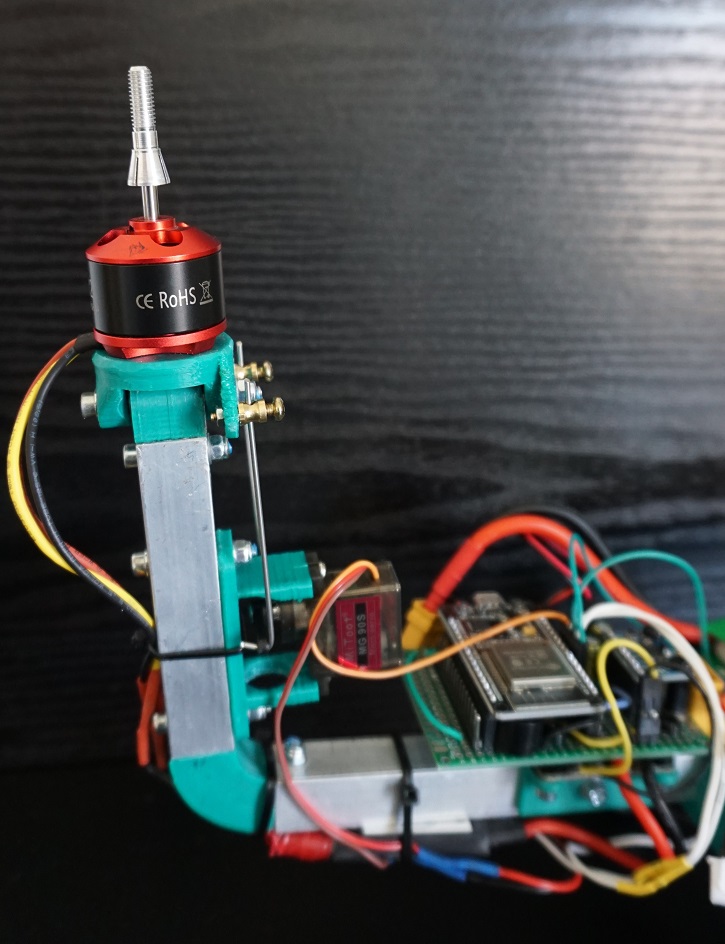
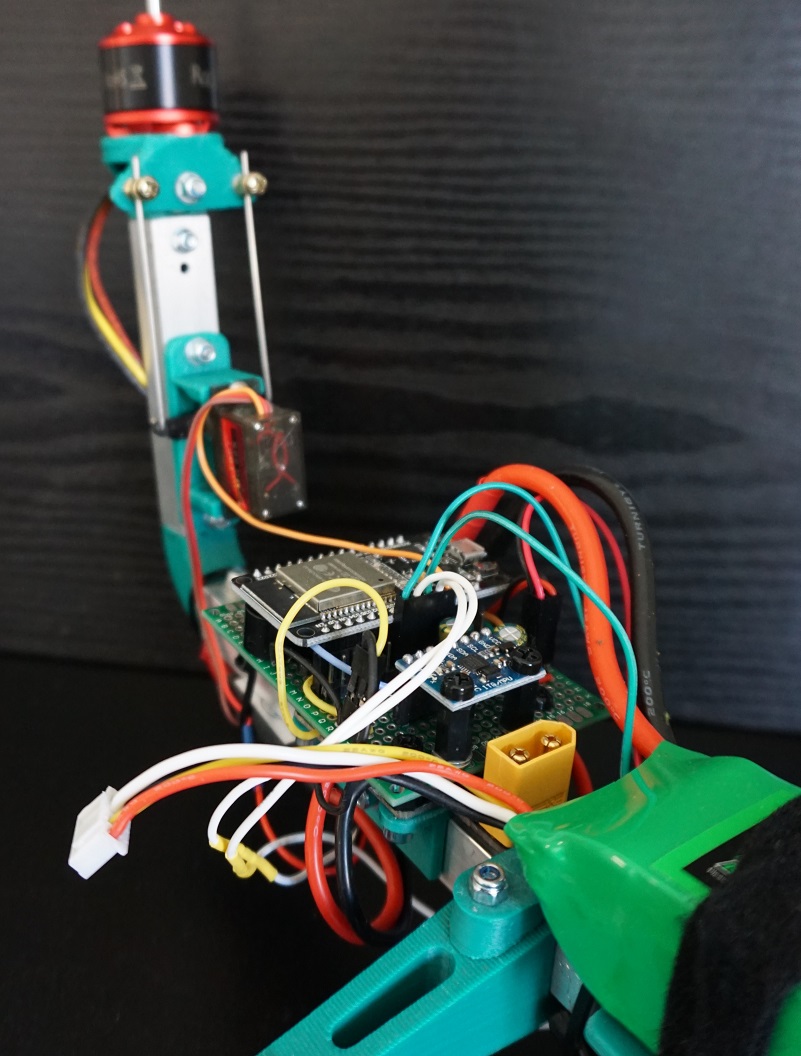
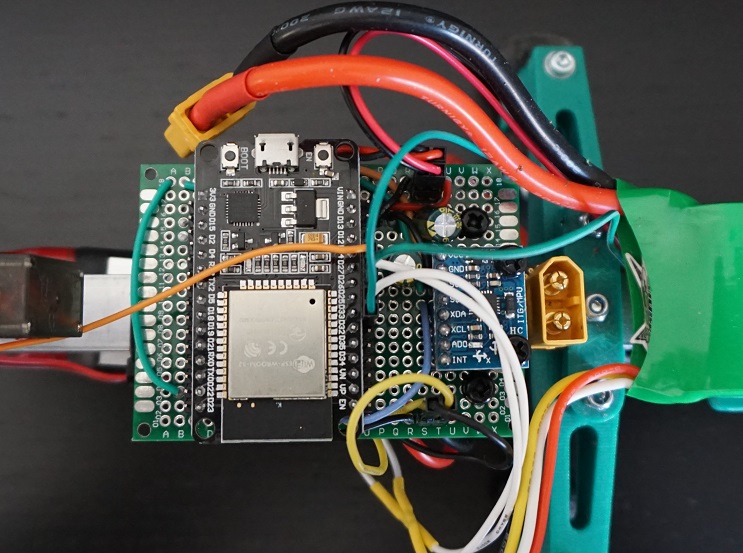
In the end I decided to program myself the flight controller software using an esp32 development board and a mpu6050 gyro/acceleration sensor; Joop Brokkings excellent tutorials did help me greatly with this. The developed software has been included with this design. The advantage of using the esp32 was that I could use the second cpu core to run a webserver which
1) shows the telemetry
2) allows changing PID settings on the fly.
Finally I achieved successful flight this way.
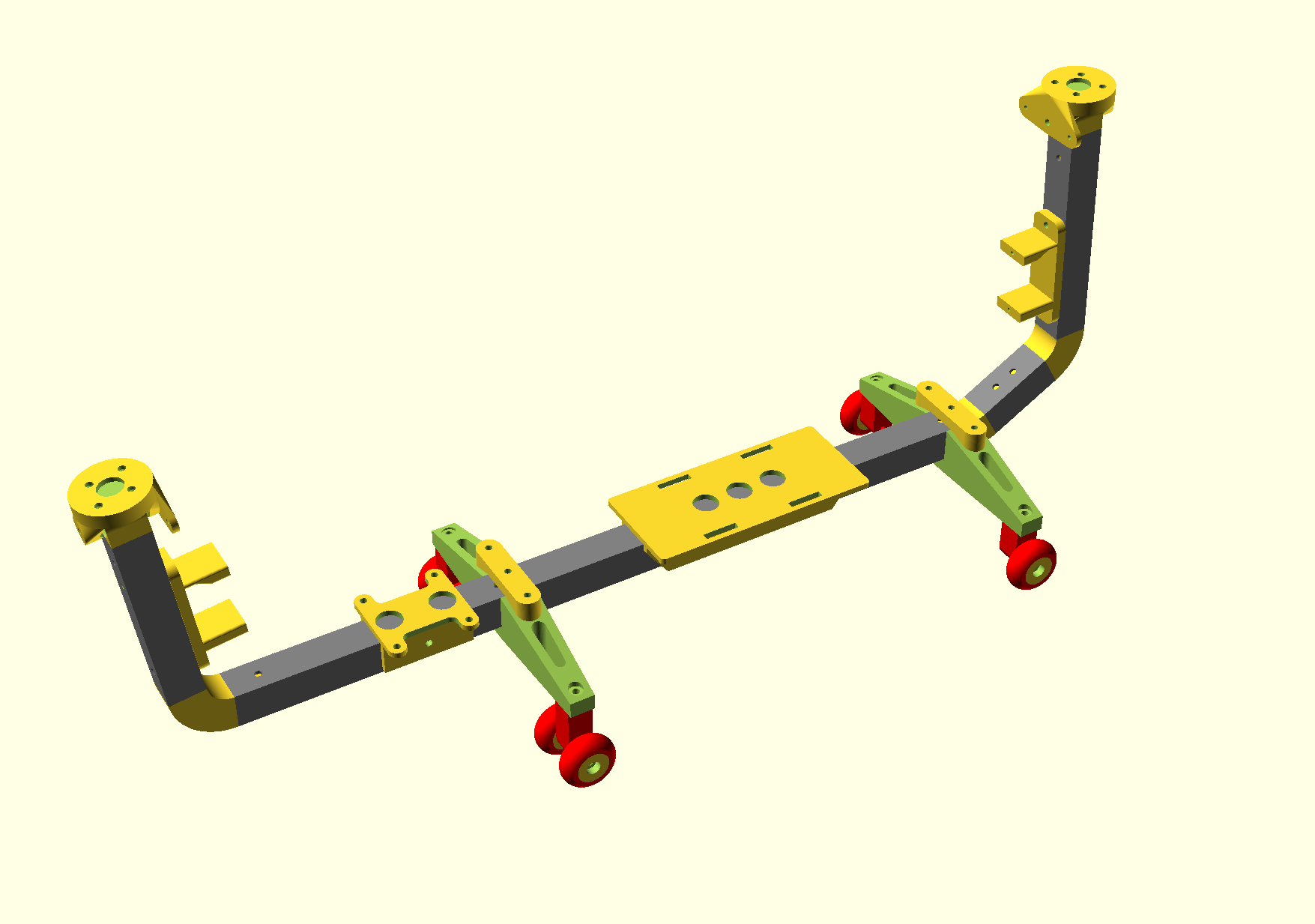
Required printed parts:
- BackWheelHolder (2x) (or BackWheelHolderFB)
- FrontWheelHolder (2x) (or FrontWheelHolderFB)
- Tire (6x)
- Rim (2x)
- RimWithScrewHeadHole (4x)
- FCMount (1x)
- FlangeBearingBracket (2x)
- InterMidCorner (1x)
- LeftCorner (1x)
- RightCorner (1x)
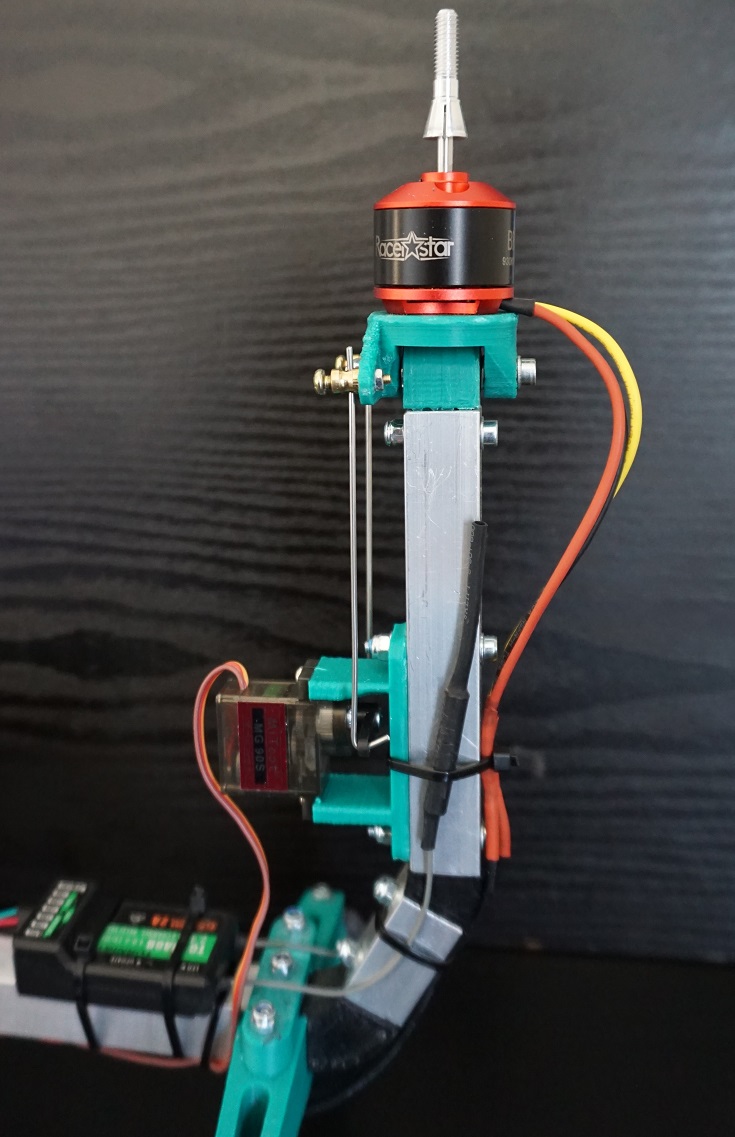
- MotorMount (2x)
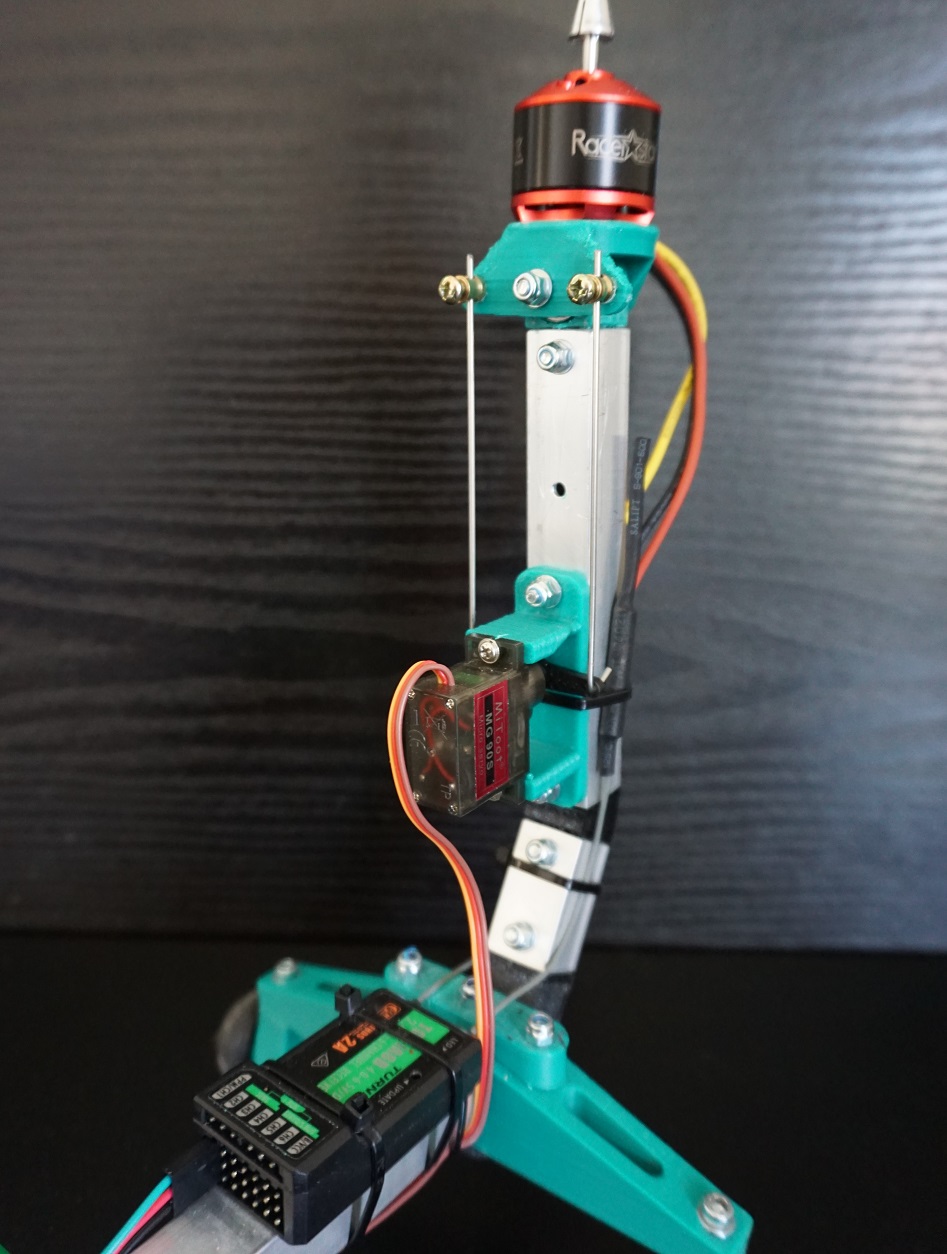
- ServoMount (2x)
- LandingGearBracket (2x)
- LandingGearBracketLid (2x)
Optional printed parts:
- ServoMountWithBuzzerHole (1x)
- battery mount (1x)
- drill helper (1x)
Hardware:
- aluminum profile (15x15)
- length 80 mm (1x)
- length 340 mm (1x)
- length 30 mm (1x)
- length 100 mm (1x)
- flange bearing F623ZZ (2x)
- propeller (1 CW, 1 CCW) 10x4.5 (254x114 mm)
Electronics:
- servo:
https://nl.aliexpress.com/item/32679996711.html?spm=a2g0s.9042311.0.0.1ec64c4d6WdVg7 - motor: (2x)
https://www.aliexpress.com/item/Racerstar-BR2212-930KV-2-4S-Brushless-Motor-For-RC-Models-Rc-Airplane/32765242161.html?spm=a2g0s.9042311.0.0.27424c4dpIsAVW - power distribution board: (1x)
https://www.aliexpress.com/item/PDB-XT60-Power-Distribution-Board-BEC-5V-2A-12V-0-5A-with-XT60-Plug-for-DIY/32862366031.html?spm=a2g0s.9042311.0.0.27424c4diC0N76 - ESC (2x)
https://www.aliexpress.com/item/M-30A-30A-SimonK-ESC-4pcs-with-BEC-For-RC-Quadcotper-Helicopter/32250741238.html?spm=a2g0s.9042311.0.0.27424c4dSotUu0 - Alarm Beeper, https://www.aliexpress.com/item/3pcs-F3-NAZE32-Flight-Controller-5V-Active-Buzzer-Alarm-Beeper-Electromagnetic-Into-SOT-Sealantss-Tube-Long/32775935165.html?spm=a2g0s.9042311.0.0.27424c4du0smXb
- esp32 development board:
https://nl.aliexpress.com/item/32864722159.html?spm=a2g0s.9042311.0.0.1ec64c4dFbKVTp - mpu6050 gyro/acceleration sensor:
https://nl.aliexpress.com/item/2035923736.html?spm=a2g0s.9042311.0.0.1ec64c4dbJ5mRc
Remarks:
- Recommended materials: ABS/PETG (95% infill) for all parts except the tires in Ninjaflex (10% infill)
- Optional part "ServoMountWithBuzzerHole " can be used instead of "ServoMount" in case one wants to add an alarm buzzer. (see photo)